
Lucky Luke autonomous robot architecture
Back to parent page: Lucky Luke autonomous robot
Introduction
This page introduces the architecture of the controlling system of the rover, called Lucky Luke. The system has components installed on the vehicle and others are immobile.
Not all components are installed on the rover itself. So the vehicle is not autonomous in itself but the whole system is. The main concept is that human commands are high level goals, instead of precise control, and are sent with a huge latency. This architecture simulates the environment of a Mars exploration vehicle.
The architecture also follows the requirements of magyarok a Marson (Hungarians on Mars) competition, a nationwide contest for autonomous robot construction.
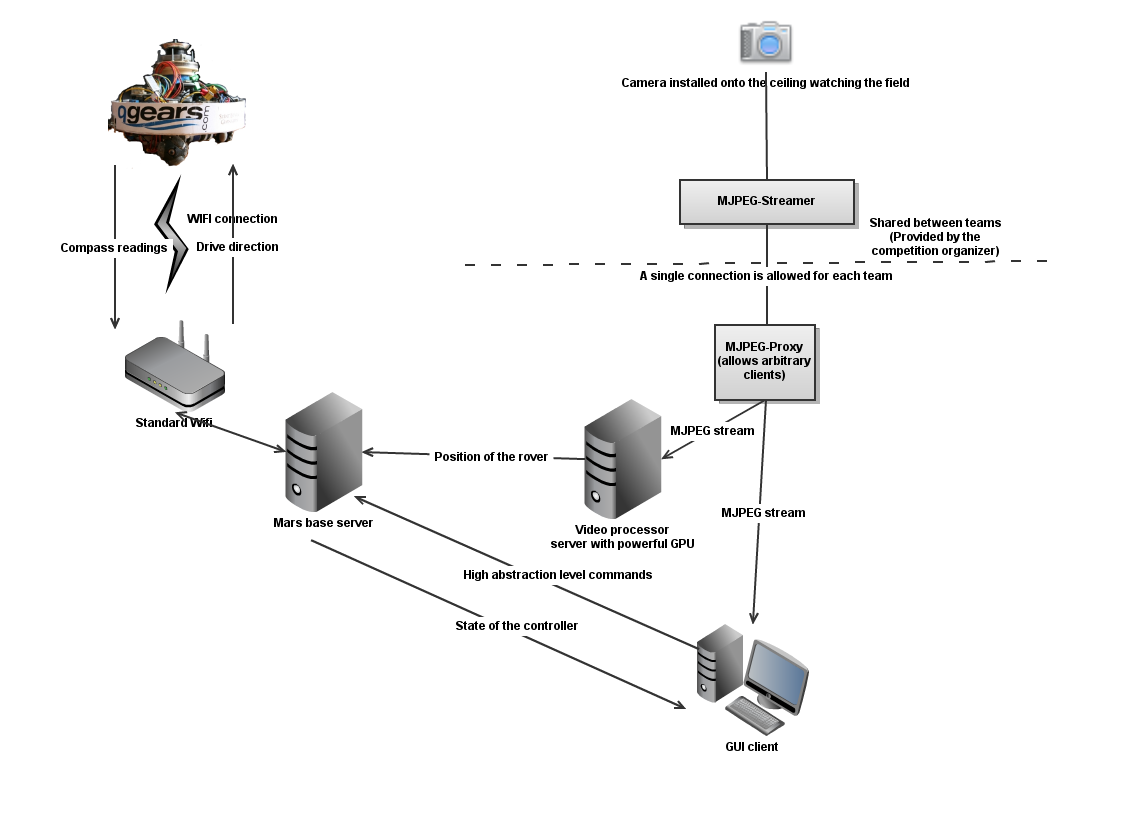 Lucky Luke System Architecture
Lucky Luke System Architecture
Immobile components
The field
The field the robots are competing on is:
- 8m x 8m big
- the floor is hard and even
- there are some gates.
- Crossing the gates gives points
Camera on the ceiling ("Satellite")
There is a camera installed on the ceiling that watches the field. The field is constructed in a way that the robots are always visible when they are on the field.
On the competition this camera was shared by the competing robots. The resolution was 640x480 for the field size of 8m x 8m. The image was streamed in MJPG format using the MJPG-streamer.
"Mars base" server
The base server is installed immobile. Our Mars Base is a powerful desktop computer with modern GPU.
On the competition the Mars base is powered by the mains and infinite computing capacity can be installed here. all human commands sent to the Mars base server have 15 seconds of latency added. This ensures that the system has to navigate the robot an autonomous way in order to be efficient.
"Earth base"
This is the computer with the commanding center GUI application where the operator gives high level commands to the rover. All human commands are sent to the Mars Base server with additional latency of 15 seconds.
Wifi router
A Wifi capable router connects all components into a single network. The rover is the only one that connects using Wifi. Others are connected by cable.
Mobile components
Lucky Luke ("the rover")
- frame made of aluminium and wood
- Lithium-ion polymer battery
- 5V Switched-mode power supply powers logic circuits
- BeagleBoard development platform running Linux
- Connected to the network using an USB Wifi module
- Directs the two Arduino boards
- two Arduino boards
- one for the engines
- one for the compass
- magnetic compass
- 3 engines
- with 64 CPR (Count Per Rotate) Encoder
- 50:1 built in gears
- 3 omniwheels
- rollers are cloaked with rubber for better traction
- visual markers
- easy to find by algorithm on the ceiling camera images